Deformation estimations on a moving racing car recording
Copyright (C) 2017 Adrien MEYNARD
This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
Author: Adrien MEYNARD Email: adrien.meynard@univ-amu.fr Created: 2017-12-19
Contents
Load signal
clear all; close all; clc; warning off; addpath('cwt'); addpath('deform_estimation'); load('signals/doppler_f1'); T = length(y);
Joint estimation
Dt = 100; % temporal subsampling for the deformation estimation dgamma0 = ones(1,T); % gamma'(t) initialization a0 = ones(1,T); % a(t) initialization wav_typ = 0; % wavelet type (cf. cwt.m) wav_paramWP = 20; % corresponding parameter for warping estimation wav_param = 500; % corresponding parameter for spectrum and AM estimations NbScales = 125; scalesAM = 2.^(linspace(1,6,NbScales)); subrate = 3; % subsampling step for the scales to ensure the covariance invertibility scalesWP = scalesAM(1:subrate:end); stopWP = 2e-2; % minimal gap between two steps in the gradient itWP = 6; % number of gradient iterations r = 1e-5; % regularization parameter Nf = 2500; % number of frequencies for spectrum estimation NbScalesS = 110; scalesS = 2.^(linspace(-1,7,NbScalesS)); % for spectrum estimation Nit = 10; % maximal number of iterations in the joint estimation stop_crit = 5e-3; % relative update threshold paramWAV = {wav_typ,wav_param,wav_paramWP}; paramAM = {'AM',scalesAM,r}; % AM (model without noise) paramWP = {scalesWP,itWP,stopWP}; paramS = {scalesS,Nf}; % AM + WP estimation fprintf('\nJoint AM and Time Warping estimation: \n\n') tic; [aML, dgammaML, Sx, evol_crit] = estim_altern(y,Dt,dgamma0,a0,paramWAV,paramWP,paramAM,paramS,stop_crit,Nit); toc; % WP estimation only fprintf('\nTime Warping estimation only (model without AM): \n\n') paramAM2 = {'no AM'}; % model with time warping only tic; [aML2, dgammaML2, Sx2, evol_crit2] = estim_altern(y,Dt,dgamma0,a0,paramWAV,paramWP,paramAM2,paramS,stop_crit,Nit); toc;
Joint AM and Time Warping estimation: Iteration 1 Relative update WP: Inf % Relative update AM: 44.80 % Iteration 2 Relative update WP: 86.91 % Relative update AM: 38.02 % Iteration 3 Relative update WP: 280.35 % Relative update AM: 8.91 % Iteration 4 Relative update WP: 166.05 % Relative update AM: 6.56 % Iteration 5 Relative update WP: 4.92 % Relative update AM: 31.46 % Iteration 6 Relative update WP: 2.84 % Relative update AM: 0.61 % Iteration 7 Relative update WP: 0.02 % Relative update AM: 0.00 % Elapsed time is 366.447932 seconds. Time Warping estimation only (model without AM): Iteration 1 Relative update WP: Inf % Iteration 2 Relative update WP: 287.05 % Iteration 3 Relative update WP: 256.44 % Iteration 4 Relative update WP: 2.36 % Iteration 5 Relative update WP: 0.01 % Elapsed time is 207.332860 seconds.
Wavelet transforms
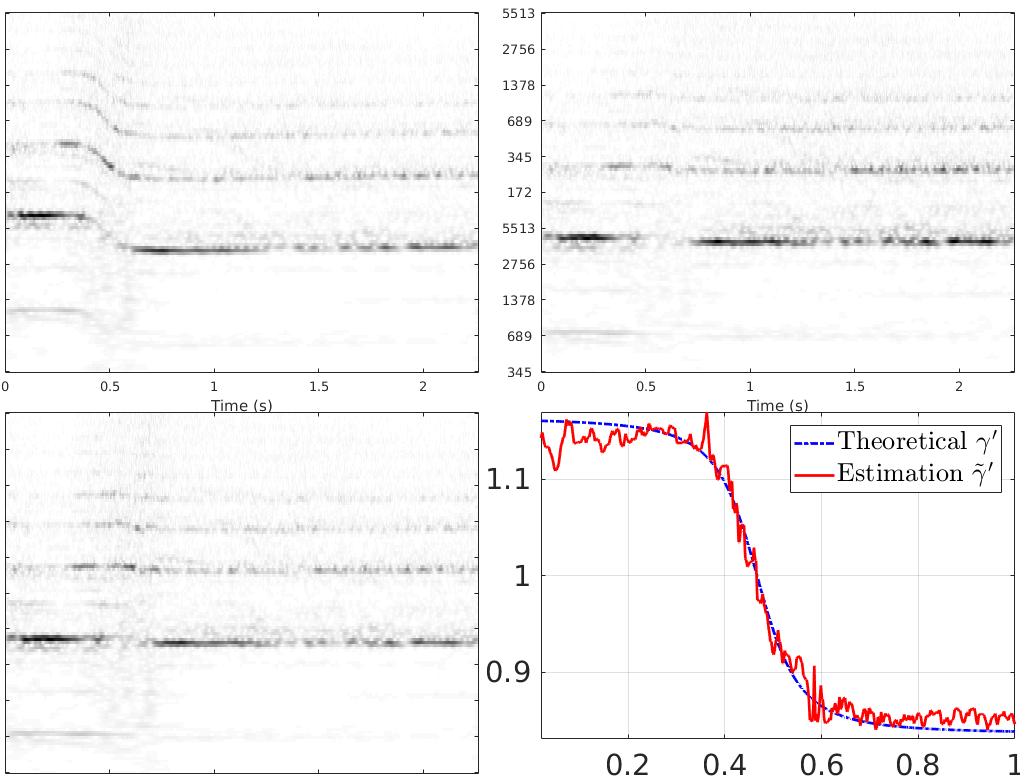
addpath('analysis'); z = statAMWP(y,aML,dgammaML); % AM + WP estimations => stationarization z2 = statAMWP(y,aML2,dgammaML2); % WP estimation only => stationarization Wy = cwt(y,scalesAM,0,wav_param); Wz = cwt(z,scalesAM,0,wav_param); Wz2 = cwt(z2,scalesAM,0,wav_param); t = linspace(0,(T-1)/Fs,T); figure; subplot('Position', [0.005 0.52, 0.465, 0.465]); imagesc(t,log2(scalesAM),abs(Wy)); xlabel('Time (s)') set(gca,'yticklabel',[]) p = subplot('Position', [0.53 0.52, 0.465, 0.465]); imagesc(t,log2(scalesAM),abs(Wz)); xi0 = Fs/4; xlabel('Time (s)') sobs = cellfun(@str2num,get(p,'yticklabel')); fobs = round(xi0./2.^sobs); set(gca,'yticklabel',fobs); colormap(flipud(gray)); subplot('Position', [0.005 0.005, 0.465, 0.465]); imagesc(t,log2(scalesAM),abs(Wz2)); set(gca,'yticklabel',[])
Doppler effect
c = 330; v = 54; d = 5; L = 25.2; dgammaTH = 1 + v.*(L-v.*t)./sqrt(d^2*(c^2-v.^2) + c^2*(L-v.*t).^2); % theoretical gamma' dgammaMLn = 1.02*dgammaML*mean(dgammaTH)/mean(dgammaML); % /!\ normalization (gamma' is estimated up to a multiplicative factor) p = subplot('Position', [0.53 0.05, 0.465, 0.42]); plot(t,dgammaTH,'b-.',t,dgammaMLn,'r', 'linewidth',2); grid on; axis tight; V = axis; axis([0.02 1 V(3) V(4)]); legend({'Theoretical $\gamma''$','Estimation $\tilde\gamma''$'},'interpreter','latex') set(gca, 'FontSize', 22);