
Si vous travaillez sur des séries (temporelles, ou spatiales) alors ce qui suit pourrait vous intéresser.
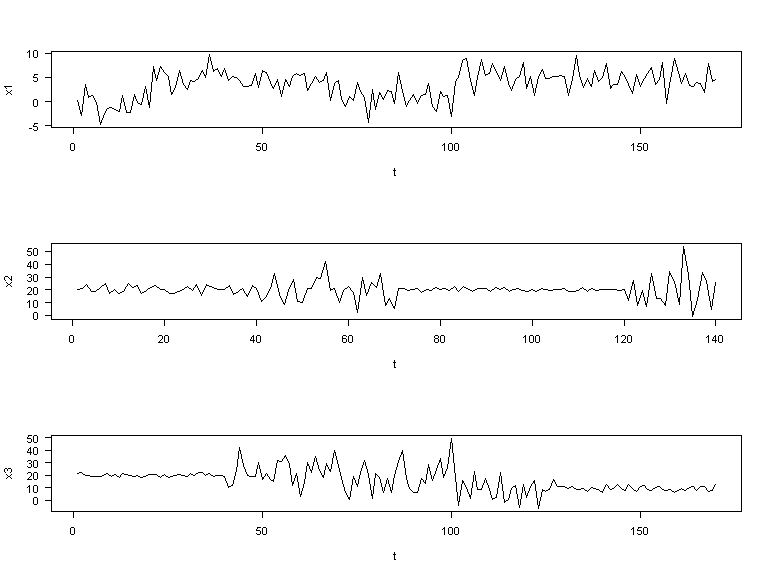
Comment faire, en effet, pour décrire et analyser des séries telles que celles-ci:
Il y a évidemment des manières très différentes de procéder pour analyser ce type de signal. L’une des plus « intuitives » consiste à découper la série en segments « homogènes ». Cette notion d’homogénéité peut recouvrir, par exemple, une homogénéité en moyenne, ou une homogénéité en variance (ou encore une homogénéité en moyenne-variance!).
Exemple: détection de ruptures de moyenne, de variance, et de moyenne ou variance
Par exemple, pour les trois séries ci-dessus, on a l’impression que:
- la série x1 est affectée par des changements de moyenne,
- la série x2 est affectée par des changements de variance, et
- la série x3 par des changements de moyenne et de variance.
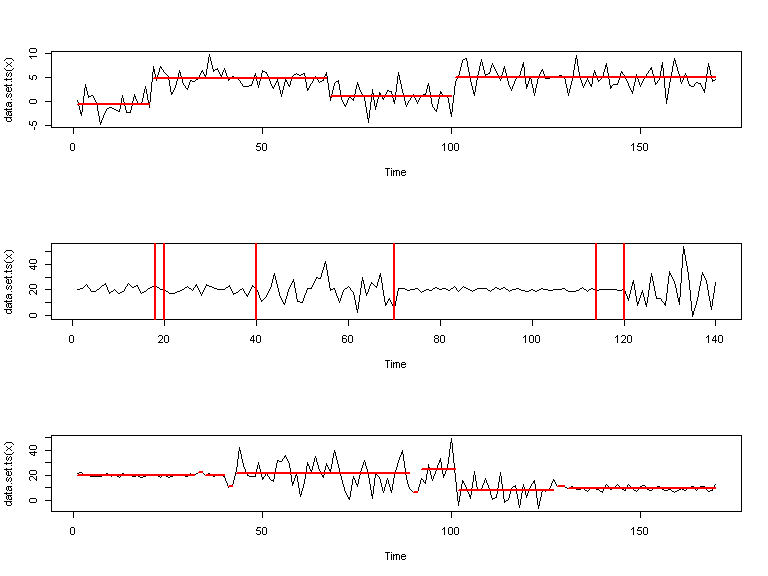
Partant de ces modèles voici le genre de segmentation que l’on pourrait proposer:
Package changepoint
Les résultats ci-dessus sont en fait obtenus en utilisant le package changepoint de Killick and Eckley (2011).
En l’occurrence, voici les codes utilisés pour générer les segmentations ci-dessus:
layout(matrix(1:3,nrow=3))
require(changepoint)
###
seg1=cpt.mean(x1,method="PELT", penalty="Manual", pen.value="5*log(n)")
plot(seg1,cpt.width=2)
###
seg2=cpt.var(x2,method="PELT")
plot(seg2,cpt.width=2)
###
seg3=cpt.meanvar(x3,method="PELT")
plot(seg3,cpt.width=2)
On a utilisé 3 fonctions différentes:
cpt.meanqu’on utilise pour détecter des ruptures dans la moyenne (sous hypothèse que la variance est constante)cpt.varqu’on utilise pour détecter des ruptures dans la variance (sous hypothèse que la moyenne est constante)cpt.meanvarqu’on utilise pour détecter des ruptures à la fois dans la moyenne et dans la variance
Ces trois fonctions sont largement paramétrables. On peut ainsi faire varier (entre autres)
- la nature de l’algorithme utilisé pour détecter les points de rupture « optimaux »
- le type de test utilisé pour localiser les ruptures (on peut soit supposer que la distribution résiduelle des variables est gaussienne, soit ne pas faire d’hypothèse de distribution et utiliser un test non-paramétrique)
- le type et l’ampleur de la pénalisation appliquée afin de limiter la sursegmentation.
Ces aspects sont discutés dans l’article de Killick and Eckley (2014)
Effet de la paramétrisation
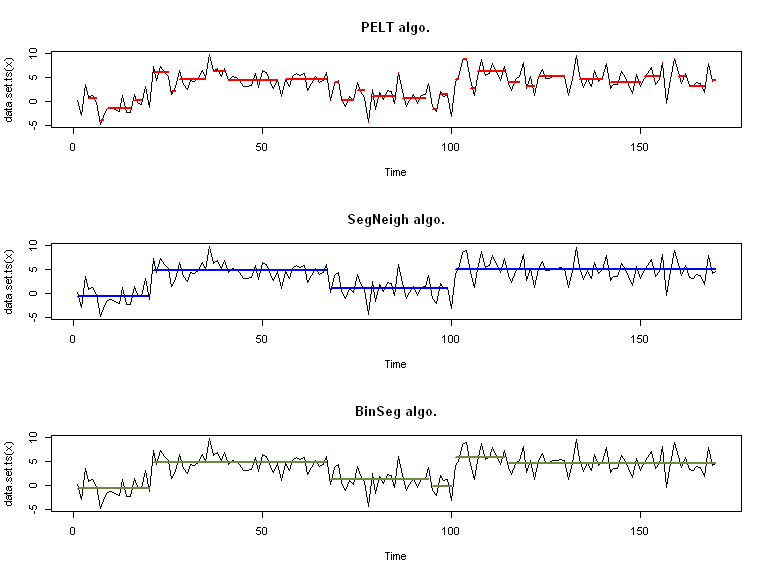
Sans surprise, les fonctions ci-dessus donnent des résultats très différents selon la façon dont on les paramètre…
Par exemple ici, on fait varier le type d’algorithme:
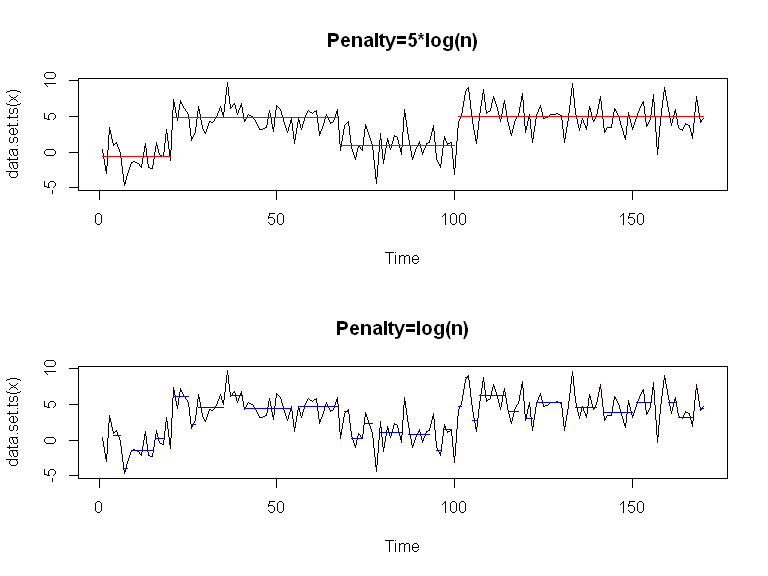
Ici, on fait varier le type de pénalité:
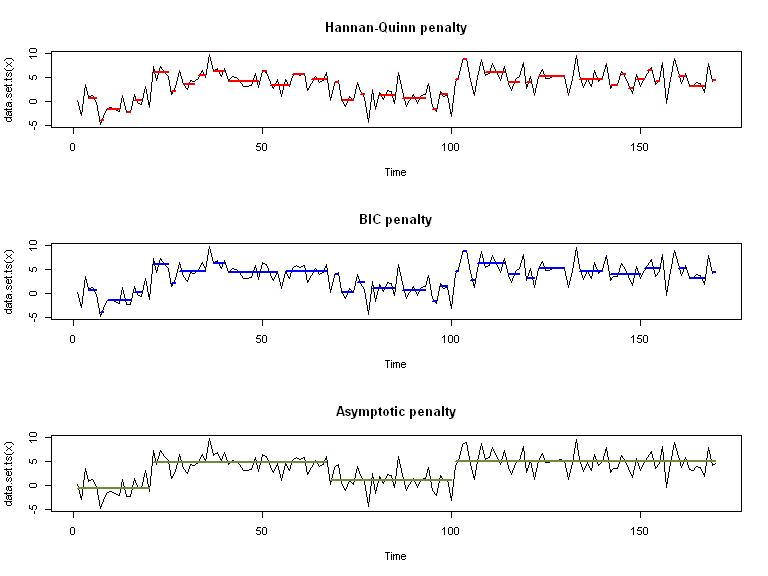
Et ici, on fait varier la valeur de la pénalité (quand fixée manuellement):
Comment choisir une méthode?
Pour choisir l’algorithme de segmentation et autres paramètres associés, on va s’appuyer sur 3 critères:
- des critères théoriques (quel modèle est le plus adapté à vos données? un avec une variance constante, un où les résidus sont gaussiens, un qui rendrait compte de segments de longueurs très variables? etc.)
- des critères empiriques (on choisit la méthode qui donne les résultats les plus « exploitables » sur des données réelles, et les plus corrects sur des données simulées)
- des critères de calcul (il faut que pour des données d’une certaine taille, la méthode soit applicable d’un point de vue calculatoire)
Evidemment, déterminer quelle est la meilleure méthode en utilisant de multiples critères de ces trois types est difficile (voire impossible). Néanmoins il est possible d’en discuter en réalisant (peut-être, tout-de-même, en moins ambitieux!!) le même type d’étude que Leviandier et al. (2012).
Ce n’est pas l’objet de ce billet (ce serait un petit peu long), mais je compte me pencher sur cette question dans les mois qui viennent… Je n’exclus donc pas de futurs billets sur ce problème (ou assimilés)…
Réferences
Killick, Rebecca, and Idris A. Eckley. 2011. changepoint: An R Package for Changepoint Analysis. http://CRAN.R-project.org/package=changepoint.
———. 2014. “changepoint: An R Package for Changepoint Analysis.” Journal of Statistical Software 58 (3). http://www.jstatsoft.org/v58/i03.
Leviandier, Thierry, A. Alber, F. Le Ber, and H. Piégay. 2012. “Comparison of Statistical Algorithms for Detecting Homogeneous River Reaches Along a Longitudinal Continuum.” Geomorphology 138 (1): 130–44. doi:10.1016/j.geomorph.2011.08.031. http://linkinghub.elsevier.com/retrieve/pii/S0169555X11004624.
5 Comments
Gina
Merci, très éclairant.
Sophie
Bonjour,
Qu’entendez vous par « distribution résiduelle des variables »? Merci
lvaudor
Bonjour Sophie,
je veux dire par là la distribution des résidus, c’est à dire la façon dont les observations se distribuent « autour du modèle » de segmentation… (Résidus= Observations-Valeurs ajustées par le modèle).
Jubar14
Hello Lise,
Est-il possible de partager le(s) jeu(x) de données que tu as utilisés dans cet exemple stp ?
J’ai fouillé dans le package « changepoint » pour voir si cette (ces) table(s) n’étaient pas fournie(s) avec, mais visiblement non.
Merci d’avance pour ton retour 😉
lvaudor
Bonjour Julien,
Effectivement, j’aurais dû inclure un jeu de données ou au moins montrer comment je l’avais généré… De fait, je m’étais contentée de le générer de manière aléatoire (en contrôlant les emplacements des ruptures, donc) de la manière suivante:
x1=c(rnorm(20,0,2),rnorm(50,5,2),rnorm(30,1,2),rnorm(70,5,2))
x2=c(rnorm(40,20,3),rnorm(30,20,10),rnorm(50,20,1),rnorm(20,20,15))
x3=c(rnorm(40,20,1),rnorm(60,20,10),rnorm(30,10,10),rnorm(40,10,2))
Je ne sais plus quelle était la graine aléatoire cependant :-/